员工姓名:杨玉帅
班 级:交控2018-05班
指导教师:李敏
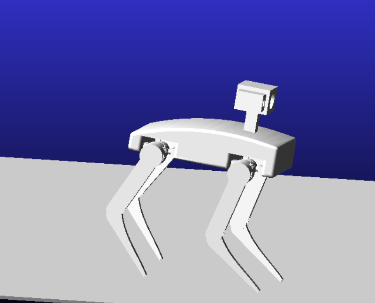
毕设题目:四足电力巡检机器人平台的步态规划


一、概况
1.选题意义
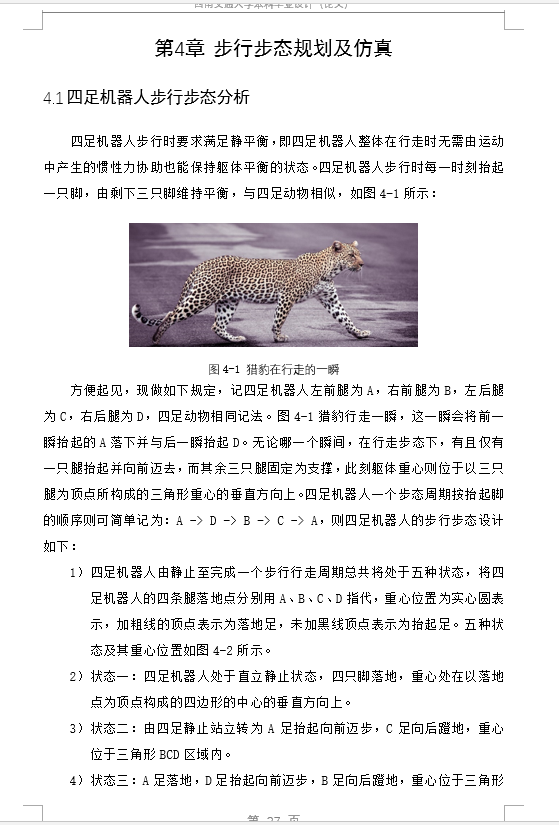
设计和制造四足机器人的初心是将人类从一些重复、繁重和危险的工作中解放出来,把宝贵且有限的人力资源节省下来。四足机器人相较于双足、轮式和履带式机器人有着众多的优点。首先,四足机器人相对于双足机器人,相同材料下,其承载能力更为出众,稳定性更强。其次相对于轮式和履带式机器人,四足机器人的四足相对离散,使用单独的电机控制,可以根据不同地形决策某足的最优落地点,从而使得机身行进更加平稳顺畅。也是因此,四足机器人特有的优点就是可以适应不同路况。例如轮式和履带式机器人在面对崎岖不平的山路和具有上下位差的阶梯时,其行进就会变的非常困难,而四足机器人可以变换步态很好适应以上路况环境,因此四足机器人可以执行更加困难和艰巨的任务。
所以四足机器人的步态规划是至关重要的,这关系到其能否顺利完成所被交付的任务。本毕业设计基于四足电力巡检机器人的平台,对四足机器人的步行步态、对角小跑步态、爬楼梯步态和定点转弯步态这四种常见的步态分别进行步态的理论规划和构建Solidworks与Adams联合四足机器人虚拟样机的步态仿真。并且根据机体俯仰角度变化与质心位移、速度、加速度变化曲线来分析步态的稳定性、合理性和科学性,给出结论和对四足机器人步态规划领域的展望。
2.任务分解
(1)查阅国内外文献,对外文文献进行翻译。了解选题背景,对四足机器人步态规划领域相关工作进行深入了解,尤其针对四足机器人步行、对角小跑、爬楼梯和定点转弯这四种常见的步态的文献资料进行大量的收集和阅读分析。
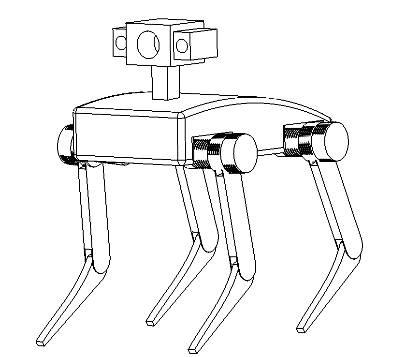
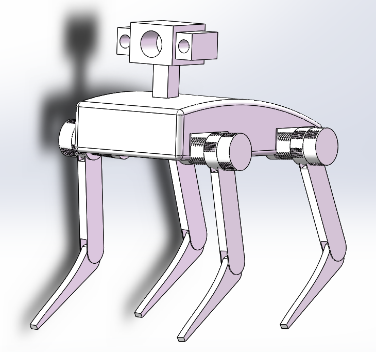
(2)对四足电力巡检机器人进行结构设计和电机与电池等标件的选择,对四足电力巡检机器人进行Solidworks三维建模,对实现步行、对角小跑和定点转弯步态的平台进行建模,对实现爬楼梯步态的阶梯进行建模。
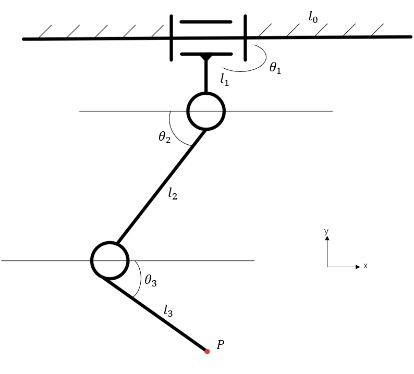
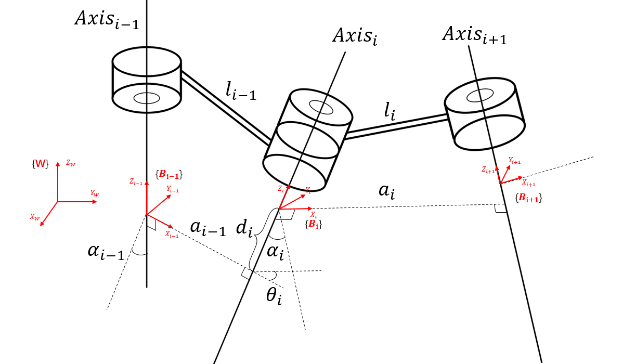
(3)学习机器人运动学的课程,总结四足机器人足端轨迹规划方法,学习机械腿的几何表示法和D-H表示法的使用,阐述足端轨迹计划和各足关节驱动函数的求解方法。
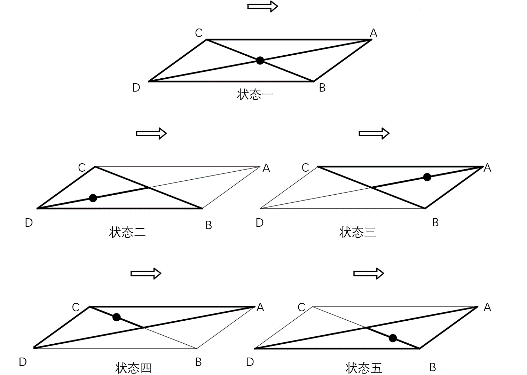
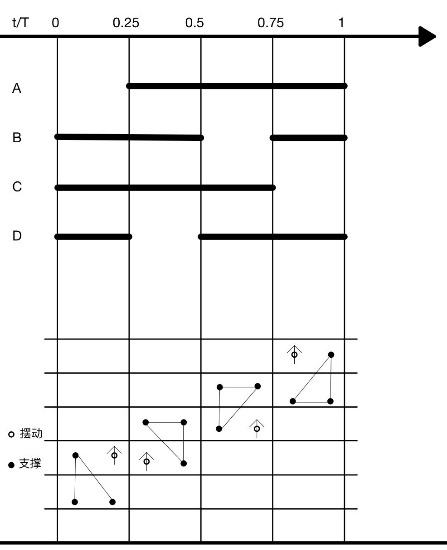
(4) 对四种步态分别进行理论规划,绘制步态状态示意图与时序图。
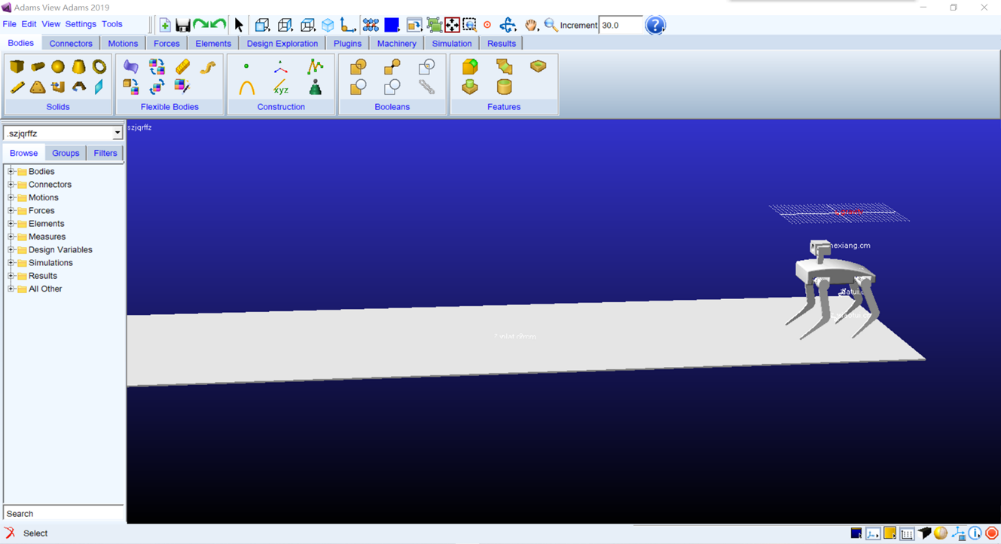
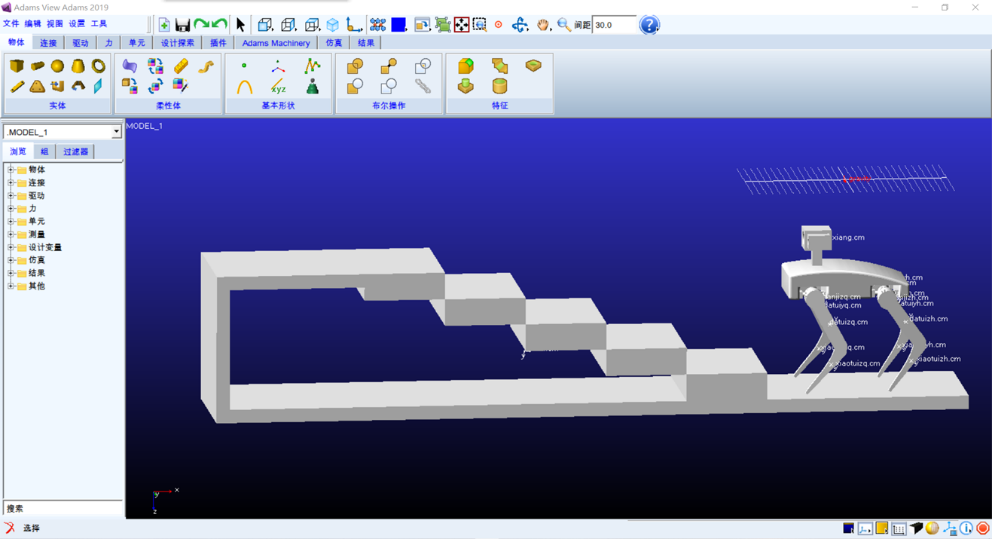
(5) 将使用Solidworks建立的三维模型导入Adams设置虚拟样机,构建四足机器人步态仿真的环境。
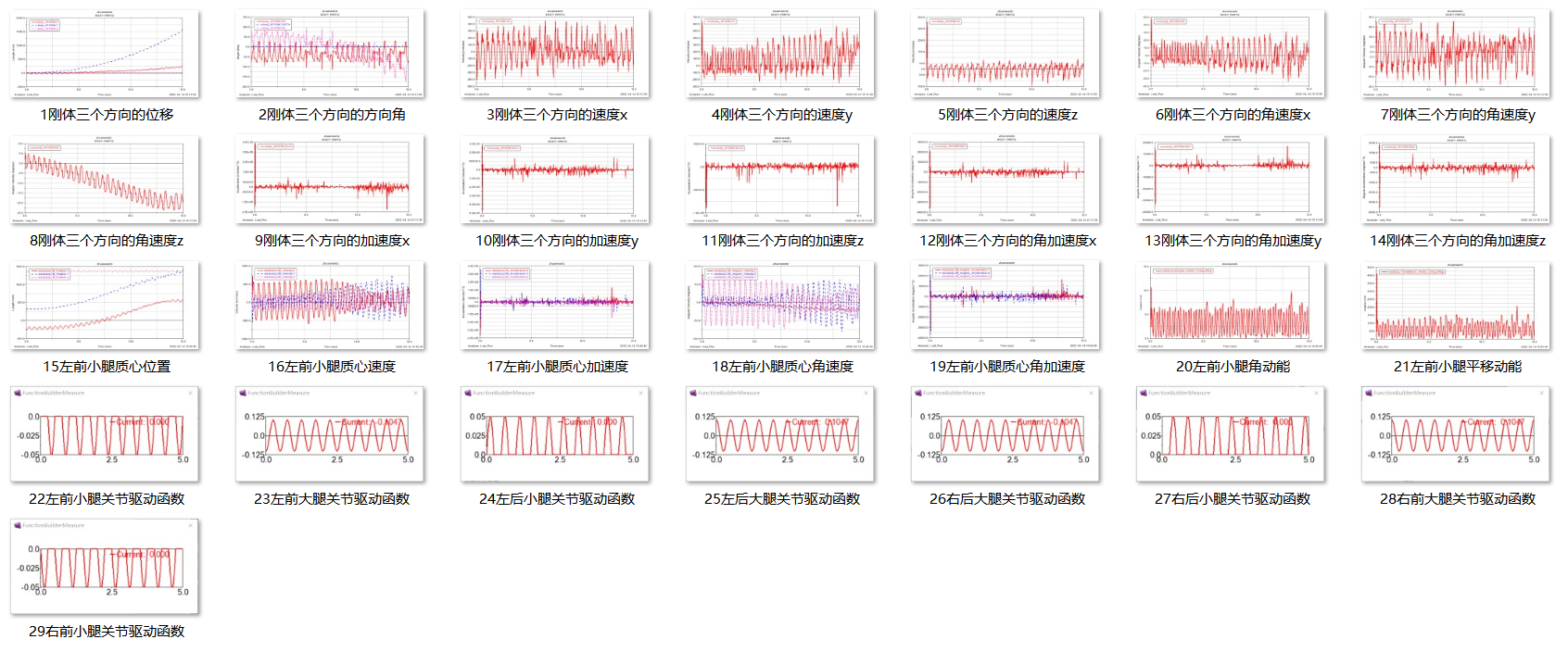
(6)分别对四种步态按照理论规划进行虚拟样机仿真,在Adams内实现四种步态的运动,输出机体俯仰角度变化与质心位移、速度、加速度变化曲线等数据并以此来分析步态的稳定性、合理性和科学性。
二、已完成工作
1.查阅国内外文献,翻译外文文献《MIT Cheetah 3 Design and Control of a Robust, Dynamic Quadruped Robot》。
2.阅读大量文献撰写论文绪论部分,简介四足机器人发展历史、简述本课题研究背景和意义、简述国内外步态规划研究现状和本文主要研究内容。
3.四足电力巡检机器人结构设计、标件选型与三维模型的搭建。
4.机器腿足端运动轨迹设计方法的详细描述。
5.对四足电力巡检机器人步行步态的理论规划。
6.对四足电力巡检机器人对角小跑步态的理论规划。
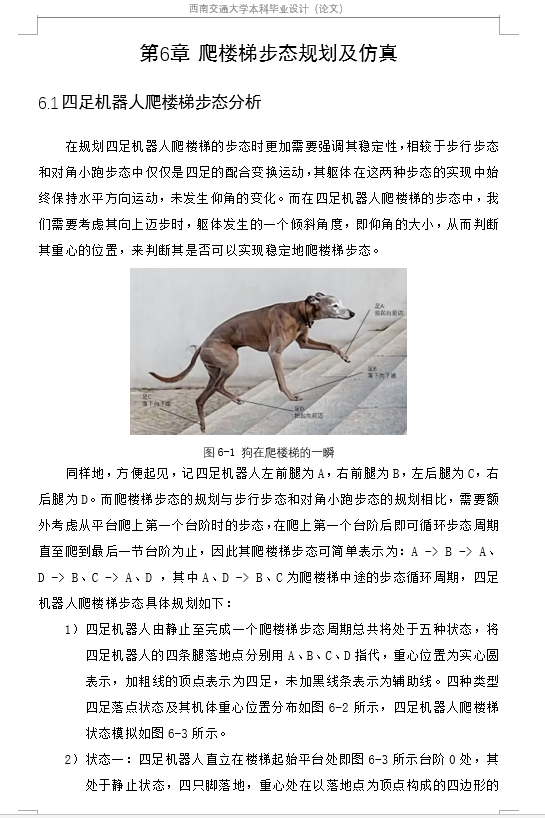
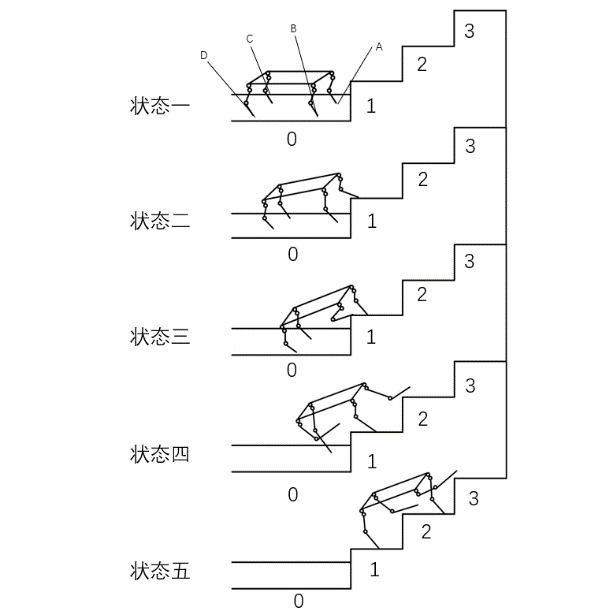
7.对四足电力巡检机器人爬楼梯步态的理论规划。
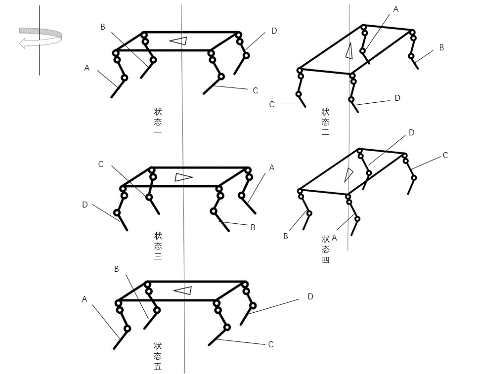
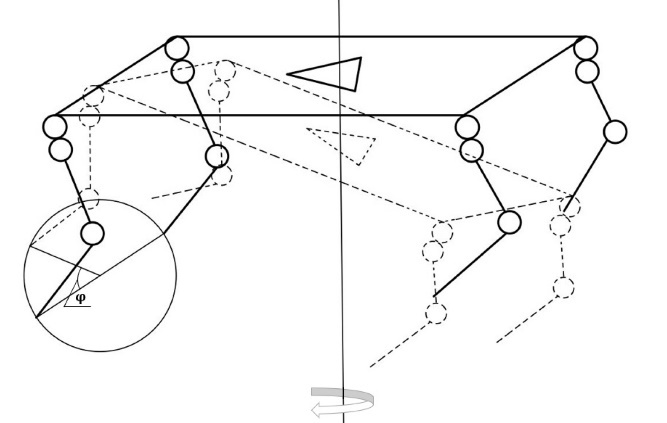
8.对四足电力巡检机器人定点转弯步态的理论规划。
9.论文仅剩下蓝色标注部分未撰写,其余章节均已撰写完成。
10.完成Adams虚拟样机环境搭建,步行、对角小跑和定点转弯步态仿真在一个环境内完成,爬楼梯步态的仿真在另一个环境内完成。
11.完成在Adams虚拟样机环境中转弯步态的仿真分析。
三、下一步工作计划
1.利用已搭建好的虚拟样机环境导入不同步态的腿部关节的驱动函数,对剩余三种步态进行仿真分析。
2.输出仿真结果中的机体俯仰角度变化与质心位移、速度、加速度变化曲线,对步态仿真结果的合理性、科学性进行分析。
3.完成毕业设计论文对应仿真章节的撰写。
4.书写结论和对四足机器人步态规划方法领域的展望,完善论文细节,整理资料准备毕业答辩。

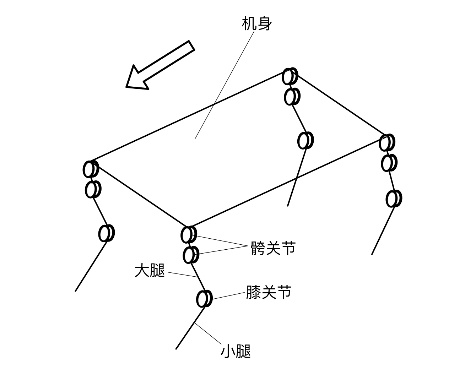
问题一:四足电力巡检机器人三维模型是否有髋关节?整体自由度是多少?
回答:所建四足电力巡检机器人模型具有髋关节,膝关节。每只腿有三个自由度即整条腿的侧向摆动,大腿前后摆动,小腿前后摆动,整体具有12个自由度。
问题二:足端轨迹是如何规划和关节角度是如何控制的?
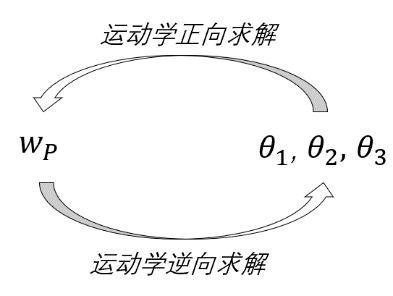
回答:足端轨迹一般是一条光滑的曲线,可用一个含参高阶多项式来表示,形状一般有复合摆线、椭圆、抛物线等等。对于一个具体的步态,我们可以根据对该步态的需求特殊点进行限制轨迹形状,对含参多项式进行求解,例如要求足端在轨迹伊始和终止两个触地点的速度和加速度趋近于0,最高点水平加速度为0,竖直速度为0等等。获得轨迹曲线后进行运动学逆向求解,可求出这条腿的各个关节的驱动函数,在Adams进行相应设置即可实现该种步态。
问题三:根据一只腿的轨迹逆向求解求出来的各个关节的驱动函数如何应用在其他腿的各个关节?
回答:若已知一条腿各个关节的驱动函数,可以根据该种步态的占空比来确定其他腿关节的驱动函数,占空比根据步态的不同,值一般为0.5或0.75,据此改变驱动函数的相位大小即可得到其他腿关节的驱动函数。

通过本次中期答辩,我对我的毕业设计题目有了更加深入细致的认识,许多前面没有被注意到的细节被老师提醒后,我深刻的意识到其重要性,也使我借此机会对前面工作进行系统和全面的总结,发现自己的不足之处,积极听取各位老师的建议,让我对接下来的工作如何开展有了更清晰的认识和预期。
毕业设计工作的顺利开展离不开李敏老师的悉心指导,在每周一次的固定组会中,我们相互交流,李敏老师指出我存在的问题并给予我非常多的设计建议,为我的结构设计和步态规划设计提供了坚实的帮助。
毕业设计工作进入后半阶段,我会更加兢兢业业的做研究,早日完成剩余工作,圆满完成毕业设计,顺利通过毕业答辩。

