员工姓名:陈葛瑞
班班级级:机械2018-06班
指导教师:鲁彩江
毕设题目:架空线路绝缘修补机器人机构设计及分析


一、概况
1.选题意义
架空电力线路是把导线架在空中输送电力,可以分为送电线路和配电线路。配电线路又分为高压、中压和低压三种配电线路。本次研究主要针对中压配电线路的设计,同理更改直径就能适应其他电压的配电线路。目前大多是配电线路都是裸露的,而配电线路不像送电线路,一般架设都不高,而且沿着马路架设,马路周围大都是树木还有居民区,环境比较复杂,容易触碰到异物从而倒是停电,并且存在安全隐患。特种车辆在作业过程中由于施工人员不注意观察电线情况,有人看到高压线路是黑色的就误认为有绝缘层,其实高压线都是裸露的,黑色是因长时间氧化造成的并且通过肉眼观察与电线距离从而导致车碰线等事故。电力专家介绍,高压线在一定距离内,都会对金属部件进行放电,所产生的电流电弧有很大破坏性,人员伤害几率非常高。
面对裸露配电线的危险,解决办法就是两种,更换电线或者将这些裸露的电线用绝缘层进行包裹。更换电线需要较长时间的停电,并且现在城市的电路比较复杂,牵一发动全身,集体更换会对居民生活造成很大的影响,而且,整体更换的话,成本高且不符合现在可持续发展的目标。相比之下,包裹方便而且经济效益高,而且对居民生活影响也小。
之前,机械化程度低,都是通过人工进行更换,但是人工包裹效率低而且作业存在危险,特别是有些地方地势比较复杂难以作业,在天气,地势比较恶劣的地方事故发生率较高,因此需要一款能够实现裸露导线局部绝缘修补、整档距绝缘改造的设备。
国外在20世纪80年代开始巡线机器人的研究,而我国是从20世纪90年代末开始这方面研究。巡线机器人方面国外起步较早,比国内领先20年,但国内发展速度快,在2000-2010期间高速发展。修补机器人方面,国内势头更猛,在2010年之后高速发展,在2020年左右已经有样机进入实验。
针对以上问题,以10kV架空裸露导线对象,设计修补机器人机械结构,并进行分析,实现裸露导线局部绝缘修补、整档距绝缘改造。
2.任务分解
第一部分 文献资料搜集、整理与阅读、翻译外文文献( 3 周)
第二部分 掌握机械系统设计方法( 2 周)
第三部分 设计机器人机械结构( 3 周)
第四部分 开展运动学、力学分析( 3 周)
第五部分 完善机器人机械结构设计( 2 周)
第六部分 整理材料并撰写毕业论文,准备答辩( 3 周)
评阅及答辩( 1 周)
二、已完成工作
2.1 整体概况:
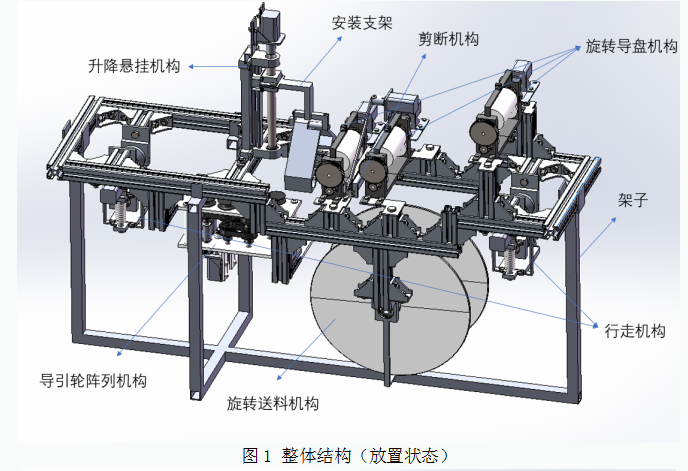
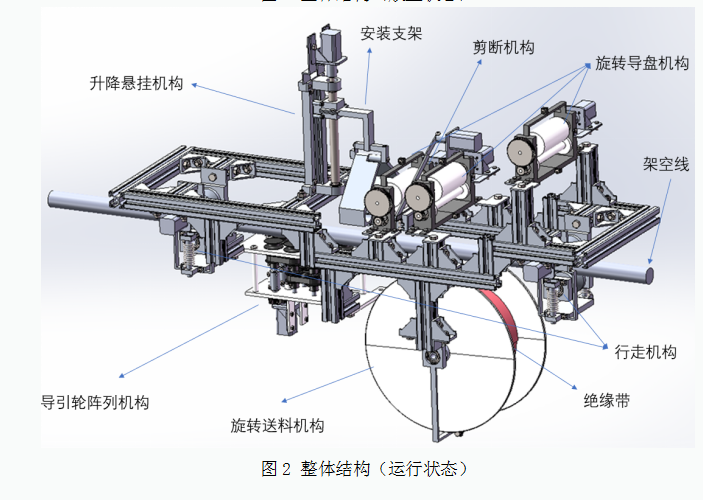
以下就是我设计的机器人的模型,如图1,是机器人在闲置状态,机器人放置在专门设计的架子上,以便放置以及取用。如图2,是机器人在工作的时候的状态,绝缘橡胶就绕在最底下的圆柱上,内部有传送机构、夹断机构、升降悬挂机构等。运行的过程为:绝缘橡胶从右侧传送进入内部,然后有一个类似夹子的活动装置中间有弹簧,当需要工作的时候升降悬挂机构下降,使得绝缘橡胶能够初步包裹导线,然后再卷入导引轮阵列机构完成包裹。当工作完成,由夹断机构剪短绝缘橡胶。
2.2 具体主要部分设计:
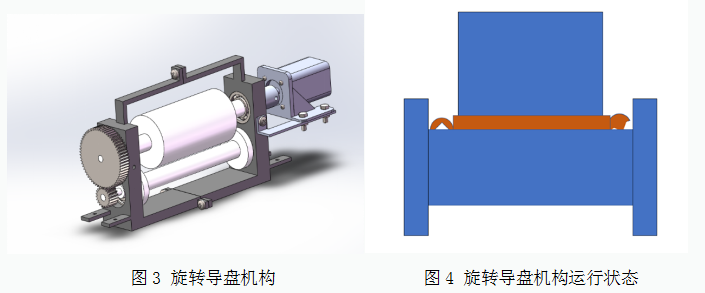
(1)旋转导盘机构:如图3所示,由上下两个滚筒组成,下滚筒两侧还有挡板,防止绝缘带偏离,如图4即为旋转导盘工作时候的状态。左侧有齿轮啮合,能够保证上下滚筒能够以同等的转速进行转动。整体框架是由左右两部分组成,这样能够方便安装,电机由右侧输入动力。
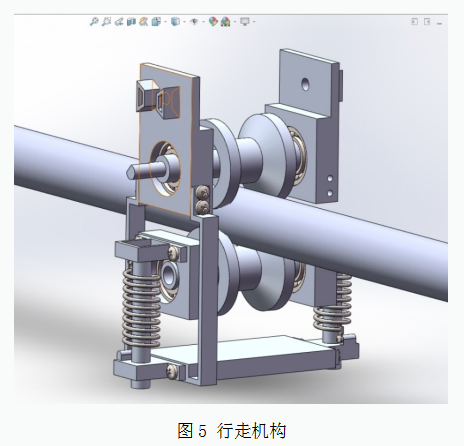
(2)行走机构:如图5,本来打算只用一个轮子的,后来想到,由于整体机器人重型难控制,有可能会发生微侧身的情况,所以在底下又加了一个轮子,并且用弹簧进行夹紧,这样能够应对这样的情况。并且,在另一侧上下轮之间没有障碍,使得机器人能够从左往右上线,不用繁琐的操作,这样有利于工人在实际情况下进行操作。
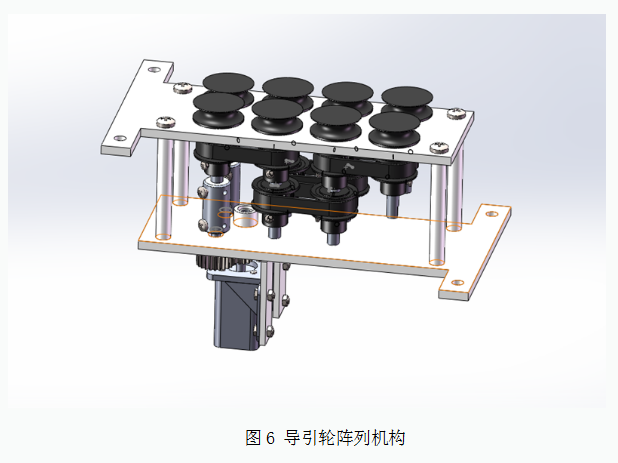
(3)导引轮阵列机构:如图6,通过一个步进电机,再加上齿轮传动,使得两侧导引轮能够互为反方向旋转,从而能够传送绝缘带同时进行包裹。导引轮是通过螺纹连接到轴上的,所以控制螺纹旋向,使得导引轮在工作过程中,处于被拧紧状态。如图7,导引轮之间的联动,是通过同步带进行传动的,使得各个导引轮转速相同。

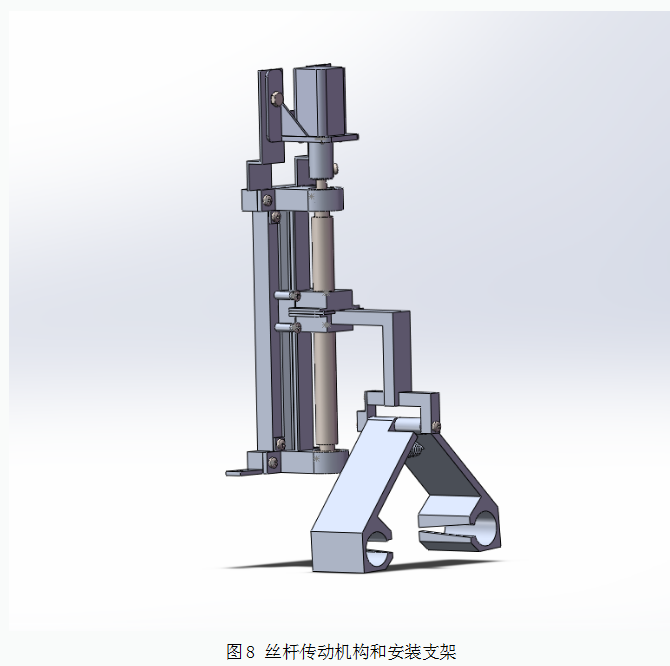
(4)丝杆传动机构以及安装支架:如图8,上部有一个步进电机,控制丝杆转动,丝杆上连着安装支架,安装支架左右支架之间有弹簧,使得自然状态下处于张开状态。在工作的时候,绝缘带从左侧进入,通道由宽变窄,使得绝缘带被夹住,然后丝杆控制安装支架往下移动,绝缘带碰到导线之后,支架会受力收紧,完成初步包裹。
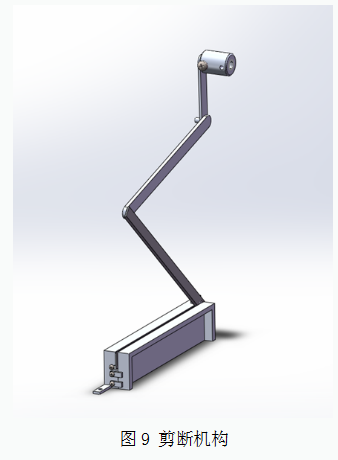
(5)剪短机构:如图9,步进电机从上端联轴器输入扭矩,电机座在另一个旋转导盘机构上,控制各杆的长度,使得一刀片一端为摆动副,使得刀片能正好完成剪断操作后就恢复打开状态。剪断机构前后有两个旋转导盘机构来保证绝缘带能够准确地输送进剪断机构,并且剪断之后进行下次修补的时候能够很好的再进行运行。
2.3 整体模型爆炸视图:
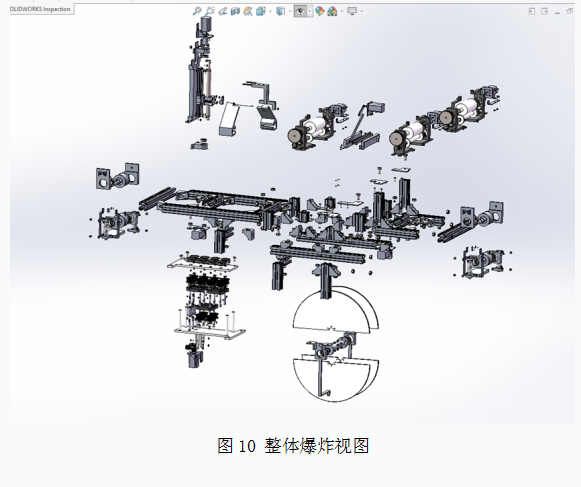
整体一共由700余个零件组成。主框架使用型材,因为型材力学特性好,能够承受比较大的力而不变形,从而不对机构运行产生影响。零件的主要连接方式为螺栓螺母连接。如图10,为整体模型的爆炸视图,一共有7个机构以及一个整体框架组成。
2.4 主要电机选型:
当绝缘包裹机器人在架空线上工作的时候,有两种情况:一种是修补的时候,前轮与后轮都不与导线直接接触,都作用在绝缘层上;另一种是修补或者整改的时候,前轮直接作用在导线上而后轮作用在绝缘层上。显然后者相比于前者更容易打滑,所以单独将后者情况拿出来做分析即可,前者情况拿来验证即可。
由于在作业的过程中,架空线存在一定的垂度,所以设计要求机器人有一定的攀爬能力,查阅资料可得,当机器人有15°的攀爬能力的时候,机器人能在大多数的架空线配电线路上工作,所以以攀爬15°为设计要求,来进行分析。如图11所示。

由于机器人是在坡度上,所以

由于轮1是在光滑架空线上,轮2是在橡胶绝缘层上,所以

由图可知:

再由上面(1)式与(2)式,得:

要使得机器人能够顺利攀爬,即:

化简,得:

由于架空线倾角θ=15°,代入(6)式得:

轮子采用铝合金制作,由于摩擦系数较低,在表面采用硅胶材料浇筑,增加摩擦力,查资料可得,轮1与架空线之间摩擦系数μ1=0.25,轮2与架空线上绝缘层之间的摩擦系μ2=0.5。所以,机器人可以顺利攀爬15°斜坡。
机器人在攀爬得时候所需要的扭矩是在整个工作过程中所需要扭矩的最大情况,建完模型,插入材料之后,得到的模型总重约为15kg,所以只要满足攀爬时所需要的扭矩即可,即:

将μ1、μ2、G的值代入到公式,g取9.8,,即可得:

由电机转矩公式:

式子中,T为电机所提供的转矩,r为轮子半径,取r=20mm。

所以,电机所需要的转矩至少为0.532 。
转速与速度公式为:

设计要求机器人得行驶速度为5m/min,即, r为轮子半径,取r=20mm。将数据代入(12)式得:

所以,电机所需要的转速至少为39.79r/min。
综上所述,电机所需要的转矩至少为0.532 N*m,所需要的转速至少为39.79r/min。由于在传动过程中存在效率问题,所以电机选择为86BYG250B步进电机,该步进电机所能提供的转矩为4.5 N*m,远远足够,该电机最大转速为200r/min,也满足要求。
其余机构例如:丝杆机构、旋转导盘机构等,用到得电机由于转矩,转速要求都比较小,所以选择57HS21型步进电机,该步进电机所能提供得转矩为1.8N*m,转速为200r/min ,也满足要求。
2.5 静力学分析:
进行静力学分析是为了检测结构的可靠性,各个机构在工作过程中由于受力会产生的变形,再根据变形,对一些不可靠的机构进行修改,对结构进行改进。
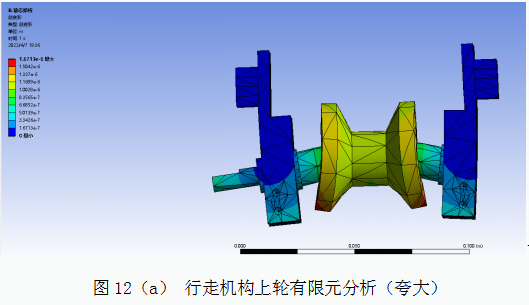
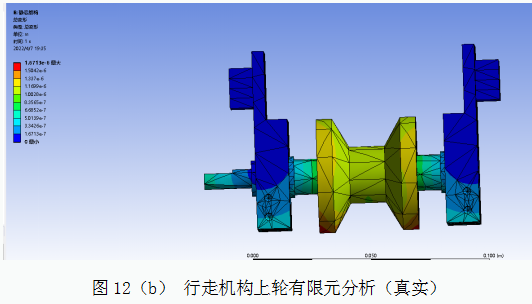
整个机构中,最危险的受力最大的机构就是行走机构,现在用Ansys Workbench对行走机构的上轮装配体进行力学分析,图12(a)为夸大情况下的变形显示,图12(b)为实际的变形显示,从图像可以分析出最容易变形的地方在轮子与架空线接触的地方,以及中间轴的变形。但是从真实的变形图可知,主要为轮子变形,轴的变形非常小。虽然轮子变形相对最大,但实际变形是很小的,最大的地方为1mm,对整个机器人不会造成影响,但是在下一步工作中可以通过加厚中间轮来使得变形变得更加小。
-
下图13(a)为夸大情况下的变形显示,图13(b)为实际的变形显示也是机构中比较容易变形的部分,模拟了绝缘带在输送过程中对上下滚筒造成的变形。虽然我使用的是上下力压力为50N(很大)的力进行力学分析,但变形依旧很小,最大处约为2mm,若要更可靠可以更换材料。


三、下一步工作计划
1.用一周多的时间对机机器人进行运动学仿真,确保机器人可以很好的完成架空线包裹的目标,且机构之间没有干涉。
2.用接下来一周时间完善对模型主要构件进行有限元分析,进行静力学分析,并对分析过程中发现的不合理的地方进行模型修改。
3.再用一周时间利用有限元进行动力学仿真,进一步确保机器人各个机构能够可靠,并对不可靠的地方进行改进。
4.再用到结题答辩的大概两周时间对之前做的工作进行整合完成毕业论文的撰写、结题报告的撰写以及结题答辩ppt的制作。

问题一:橡胶包裹层在传输过程中从旋转送料机构到第一个旋转导盘机构的时候,包裹层角度比较小,所需要的力可能比较大,应该如何解决?
回答:可以在框架前侧再加一个旋转导盘机构从而增大输送传送带的时候的角度,使得输送更平顺,输送所需要的力更小。
问题二:旋转导盘机构在进行静力学分析的时候,分析受到的力的大小是怎么确定的?
回答:分析过程中采用比正常估算输送绝缘带所需要的力大了很多,从而保证旋转导盘机构的可靠性。
问题三:在运动学分析以及力学分析过程中,可能会有些机构或者结构不合理,你打算什么时候修改调整呢?
回答:先进行运动学分析,保证整个机器人运行过程合理,没有干涉或者完不成包裹的现象,如果分析过程中发现问题,及时对机构进行修改,调整。再对机器人进行静力学和动力学分析,观察机构的变形情况,若变形在可接受范围之内,那就不修改;否则立马对机构进行修改调整,直到各项指标符合设计要求的可靠性为止。

毕业设计是本科学习过程中的最后一个环节,是对我们大学四年所学的知识的一种综合运用,是一种深入学习,再次提高的一个过程。同时,毕业设计是独自完成,并且从设计到仿真都是自己独立思考从而完成的,与之前的课程设计,专业设计有很大区别,培养的是我们独立学习以及度力思考的能力。
在我完成我的毕业设计过程中,机器人的三维建模锻炼了我之前所学软件Solidworks的使用,之前学习过程中,只是对比较简单的减速器进行了装配,而本次毕业设计是对多达700多的零件的大装配体进行装配,要考虑的问题更加复杂。同时,仿真过程中还要用到ANSYS这款有限元的软件,不过这次使用的是这款软件中的Workbench部分。在做毕设的过程中,一边学习,一边实践,我觉得非常有意义。
本次中期答辩重视的是我们在开题到中期这一个月的时间里所做的工作,各位评委老师也强调让我们展示自己所做的,并对我们所做的东西提出意见,做出指导。我针对评委老师对我的模型以及仿真提出的意见以及指导进行了思考,意识到了自己所设计的机器人一些地方的有些不合理,没考虑在实际运行过程中会产生的问题,例如:橡胶绝缘带输送过程中的角度问题等,这些都是需要改进的地方。针对这些问题,我会用接下来的时间对模型进行修改,并且使用软件进行运动学、力学仿真,从而使得我的毕业设计更加合理可靠。本次中期答辩我觉得也是一种督促,督促我们按照安排计划完成毕业设计以防止在结题前草草赶任务,造成延期的问题。
最后感谢我的导师,他很负责,每周开一次组会,在开组会的过程中,对我们每一位员工分别进行耐心的指导,并且督促我们按照计划完成毕业设计。

