
员工姓名:陆浩
班 级:车辆2019-03班
指导教师:刘伟群
毕设题目:发条式步行能量收集装置设计与分析


一、概况
1.选题意义
近几年来,随着集成电路微机电系统(MEMS)的快速发展,人们对MEMS元件的尺寸要求也越来越高,即要求元件尺寸微小化和高精度化。这些技术的不断发展意味着物联网和无线传感器网络可应用于许多场景,如机械监控、家庭自动化、个人健康管理和海洋信息采集。在这些网络系统中,不计其数的微型传感器以及微型致动器扮演着重要角色。环境的复杂化,对MEMS元件的性能要求也越来越高,而可持续性便是其中重要的一环。虽然这些换能器能耗较低,但是他们仍然需要外部电源例如电池之类的外部能源供给。
而传统电池存在着一定的危害,如安全性差,容易发生爆炸,在一些人员密集场合使用时极易造成人员伤亡;不适用于大电流放电的场合,且价格昂贵;线路需要进行单独保护,且电池需要周期性维护,防止电池被过量充放电;生产要求条件较高,意味着高成本;使用条件限制较大,温度过高、过低均有风险;内部存在部分有毒物质,容易造成环境危害。
最近,振动能量收集已经被推崇并且认为是一种用来代替传统电池的可靠可持续的能源。振动能量采集具有环保、可持续的特点,能够在一些常见的场合中,如人体运动、车辆运动等,得到应用。而随着这项技术的不断更新,人们从振动的场合中采集能量的效率也在不断提升。现在这项技术的发展已经能够满足大部分微型传感器的使用。这项技术主要依靠吸收环境能量并通过摩擦生电、压电、电磁感应以及静电等技术将振动产生的机械能转化为电能。
随着微元器件的不断发展,可用于人们身上的可穿戴式传感器如一些温湿度传感器、微型心率测量仪等等,不断涌现出来,通过振动能量采集技术,要求的电能完全可以从人体自身运动中进行采集和应用。
2.任务分解
1、查阅国内外关于振动俘能器相关知识,了解振动能量采集器地国内外发展现状,理解静电、磁电、压电、摩擦电的工作方式及原理。
2、翻译相关外文资料。
3、自学并独立对人体步行的力学激励进行分析。
4、了解发条的工作原理及工作特点,独立设计发条式集能器,建立理论模型和实物模型,Ansys进行静力学分析。
5、利用matlab对机电耦合模型进行仿真分析,修改参数得到相应的响应曲线。
6、制作实物模型,改变相应零件参数,验证理论分析。
7、撰写毕业论文,准备毕业答辩。
二、已完成工作
1、查阅大量英文中文资料,了解了振动集能器相关知识,了解振动能量采集器的国内外发展现状,理解静电、磁电、压电、摩擦电的工作方式及原理。同时查阅大量资料对人体低频集能器发展现状有了一定的了解;查阅文献和视频,了解了发条的具体工作原理和应用方式;完成外文文献的翻译。
图1 外文文献翻译
2、对整体装置完成了设计,主要包括集能器模块和连接模块两个部分。

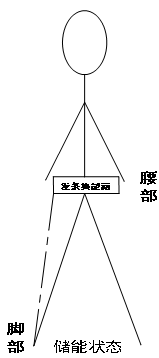

图2 发条集能装置工作原理
如图2所示,对发条集能装置的工作方式进行了设计,当行人抬脚时,发条为初始/释能状态,此时发条保持原位,不进行能量转化;当行人放脚,向前方行进时,发条上紧,生物能转化为发条弹性势能,连接模块挂钩分离,发条释能,将弹性势能转化为机械能带动电机转动,再将机械能转化为电能。
Ⅰ.发条集能器模块设计
图3 发条集能器模块设计
发条集能器模块主要机构如图所示,发条放置在发条盒中,通过大齿轮所在的轴固定。行人走路时,通过拉动细线的方式带动大齿轮轴旋转,此时发条开始上紧,由于棘轮的原因,虽然大小齿轮相互啮合,但是大齿轮轴并不会带动电机轴转动。当行人完成一次放脚,细线收回发条开始释能,此时大齿轮轴反向旋转,通过与小齿轮的啮合,将旋转圈数放大的同时带动电机轴进行转动,电机轴通过联轴器连接带动电机转动,同时利用飞轮保持一定时间的旋转,这样就将人体运动的生物能,转化成了弹性势能,再转化成机械能,最后转化成电能供给后续使用。

图4 能量转换图
Ⅱ.连接模块设计
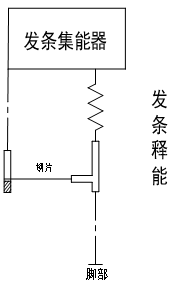

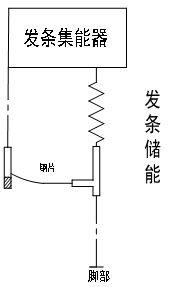
图5 连接模块设计示意图
由于不同人群行走步伐长度不同,导致集能器直接连接人体脚部工作不稳定,因而需要设计连接模块来匹配不同步长人群步行能量的采集。
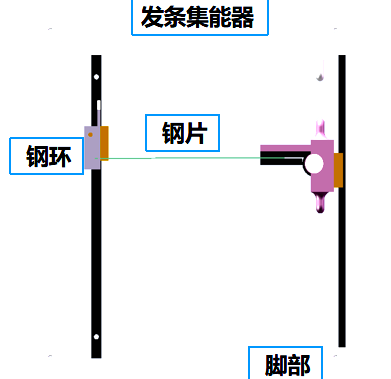
图6连接模块三维设计
如图所示,左侧钢环连接上方发条集能器,右侧连接人体脚部,脚部向下带动右侧钢片夹向下运动,钢片夹向下带动钢片,钢片与钢环接触产生挠度,直至下降到要求距离,发条力达到设定值,钢片弯曲与钢环发生分离,钢环向上运动发条释能。
对于钢片来说,需要通过Ansys软件对其进行静力学分析,设计对应发条最终拉力14N时,挠度为1mm左右的钢片。
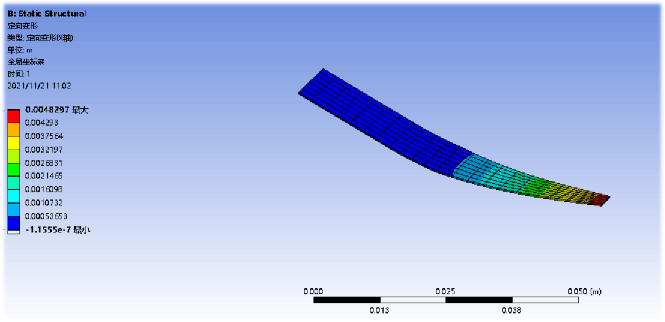
图7 ansys钢片分析
3、机电耦合方程及仿真模型建立
Ⅰ.机电耦合方程
发条力存在时为发条集能器工作的第一阶段,此时机电耦合方程为:
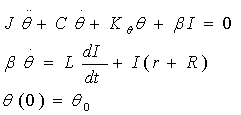
(式1)
此时弹簧力始终存在,驱动装置运动;
当发条力为0时,此时装置由于飞轮的惯性保持旋转,为工作的第二阶段,机电耦合方程为:
(式2)
符号 |
定义 |
数值 |
J |
转动惯量 |
/ |
C |
阻尼系数 |
/ |
K |
发条刚度 |
/ |
β |
转换系数 |
0.071 |
L |
电机电感 |
0.119mH |
R |
负载电阻 |
/ |
r |
电机内阻 |
100Ω |
表1 机电耦合方程参数表
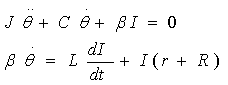
Ⅱ.simulink建模
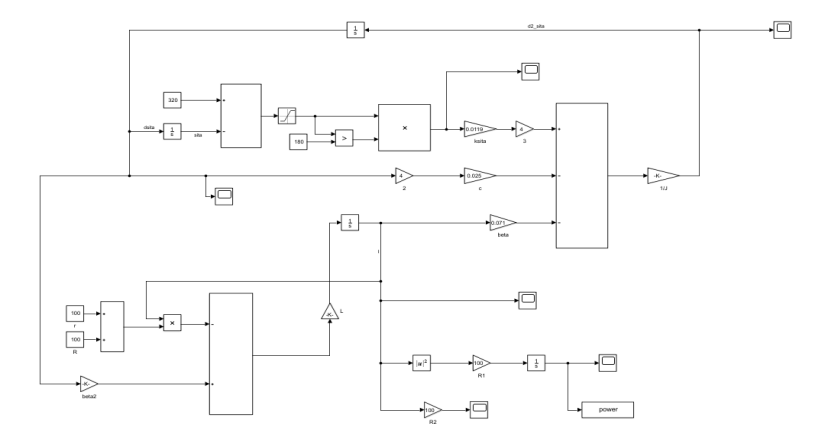
图8 simulink模型建立
图9 角速度仿真趋势曲线
如图9所示,加速度变化分为三个阶段。第一阶段,发条力大于阻尼力,装置加速;第二阶段,发条力小于阻尼力,但是仍旧存在,装置减速;第三阶段,发条力为0,装置中仅有阻尼力,减速,与机电耦合方程对应。
4、实物制作及实验
Ⅰ.发条集能器模块实物制作

图10 发条集能器模块俯视图

图11 发条集能器模块左视图
Ⅱ.实物实验
①单次实验
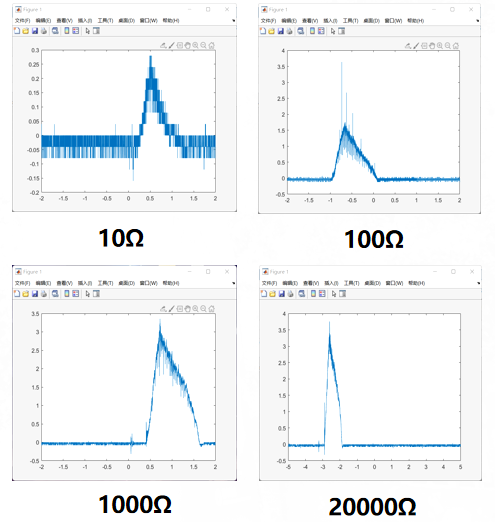
图12 单次激励情况下不同负载电阻电阻的电压曲线图
②多次实验
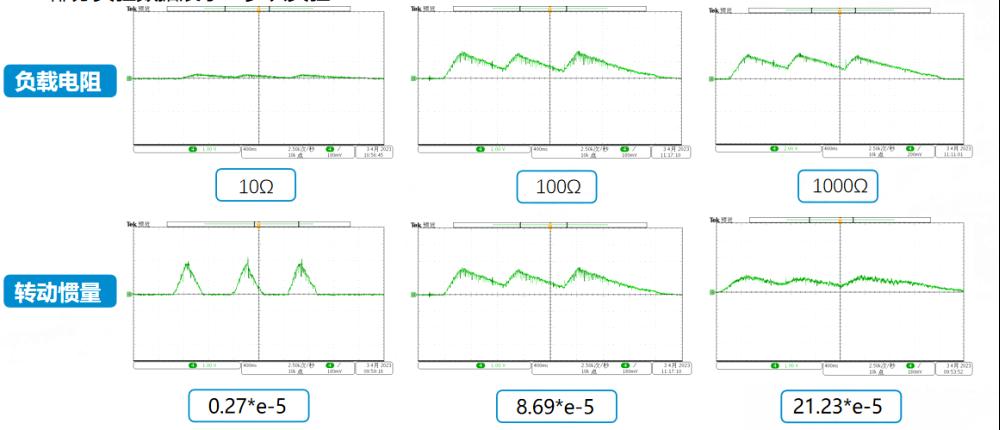
图13 多次激励下不同电阻、转动惯量的电压曲线图
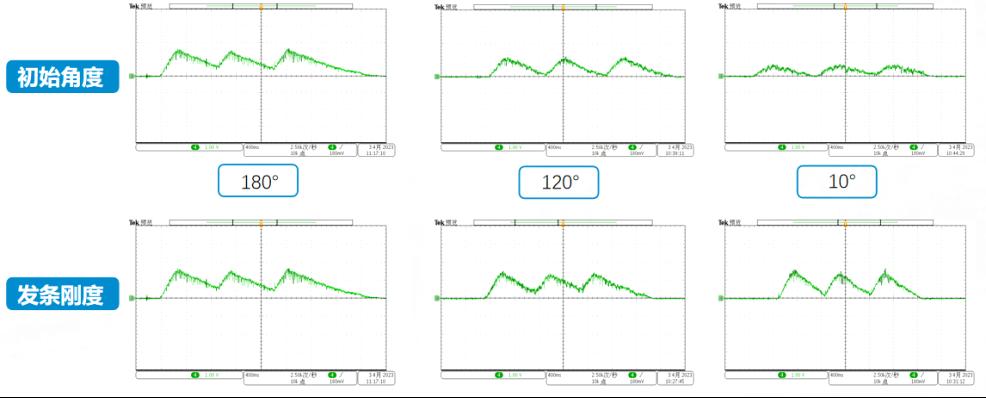
图14 多次激励下不同初始角度、发条刚度的电压曲线图
③稳态实验
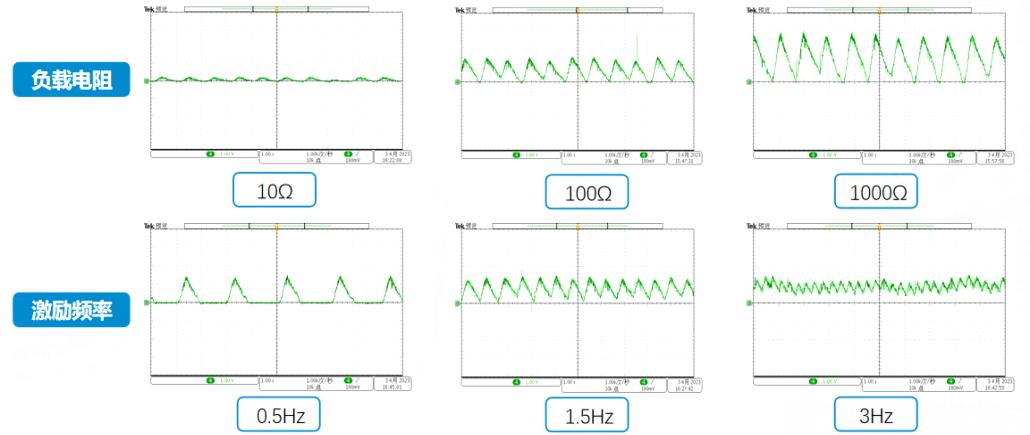
图14 稳态下不同负载电阻、激励频率的电压曲线图
三、下一步工作计划
1、第七周至第八周:完成仿真所需参数的测量,完成仿真分析。
2、第八周至第九周:补足实验,辅助理论验证,完善实物制作。
3、第九周至第十三周:撰写毕业论文,准备毕业答辩。

问题一:电机的机电转换系数如何确定?
回答:利用转速表测得一定转速下对电机空载转动产生的电压,本次设计中测得电机转速为380rpm时,空载电压为2.6V,得出机电转换系数约为0.071。
问题二:装置的功率大概有多少?转化效率达到多少?功率损耗在什么位置?
回答:以负载电阻为100Ω为例,装置的功率大概能达到10至15mW左右,输入功率通过人体带动装置的力与距离计算约为180mW左右,装置的整体效率大约为5%至10%。功率损耗主要在机械结构中,由于大齿轮质量相对较大,具有一定的转动惯量,造成能量损失较大。

在毕设进行的近4个月中,我收获到了许多。与学习和竞赛不同的是,我第一次体验了自己进行理论设计、数学建模、三维建模、动力学仿真、实物制作的整个过程,对机械设计方面有了更加深入的理解,设计思想从幼稚逐渐走向成熟,考虑问题的方式也愈加全面,例如功率损耗的考虑、机电耦合方程是否符合装置运动规律等,刘老师一次次指导,让我对装置的设计思维和理解一次又一次重建,也让我对振动集能器方面的知识有了更加深刻的了解。
感谢本次中期答辩的老师,老师们提出的问题让我对毕业设计有了更加深刻的了解,相信在后半程的毕业设计中我能够更加游刃有余地完成。感谢刘伟群老师的细心解答,每次的毕设研讨会总能让我发现新的问题,并且经过讨论找到解决问题的思路,使我的科研思维有了一定的提升。

