员工姓名:胡仕超
班 级:机械2020-06班
指导教师:何填欣
毕设题目:自适应光照下工件定位抓取的视觉伺服控制系统设计


一、概况
1.选题意义
本课程设计针对基于视觉识别技术的机械臂抓取工件的对光照条件的敏感性的特点,指导员工通过学习机械臂应用中的视觉感知和反馈控制技术,并在工件抓取的应用中考虑光照条件,根据不同的自然光背景,调节配置光照参数,自适应地调节光照强度等,从而解决自然光干扰的问题。通过该毕业设计,锻炼员工综合应用所学知识,以及分析和解决现实问题的能力。
2.任务分解
(1)熟悉题目,搜集文献,明确国内外发展现状,完成准备工作。
(2)建立自适应光照调节模型:系统需要能够实时检测工作环境的光照条件并且进行调节,以便根据不同的光照条件对机器人的抓取操作进行优化。
(3)模型最优化解决,完善自适应光照调节系统。
(4)自适应光照视觉伺服系统的构建,以及测试优化。
(5)总结撰写1.5万字的毕业设计论文并准备答辩。
二、已完成工作
1.明确系统的构造以及运行方式:
构造:伯朗特六自由度机械臂板块、西门子控制系统板块、海康工业相机以及辅助设备板块。(下图所示)

图1:伯朗特六自由度机械臂和工业相机
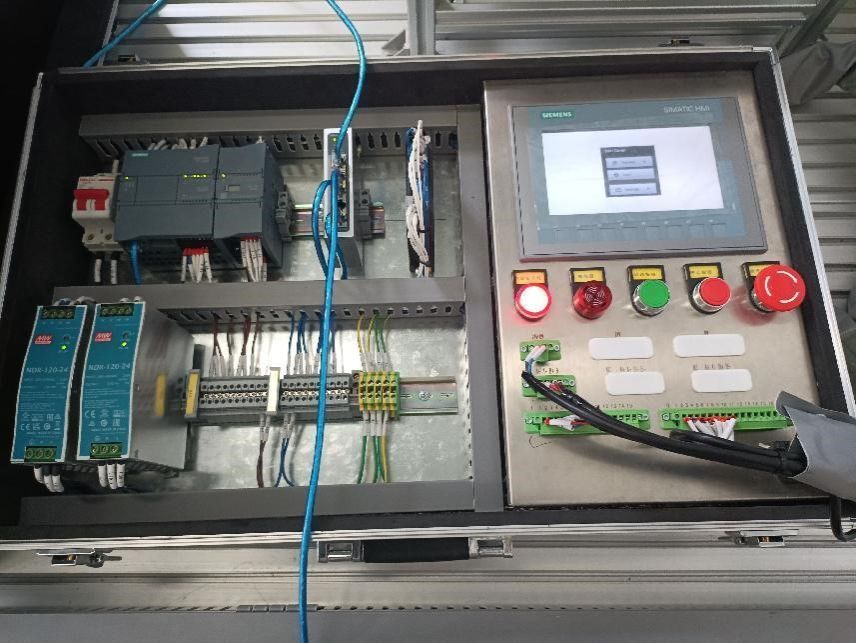
图2:西门子控制系统板块:CPU和触摸屏
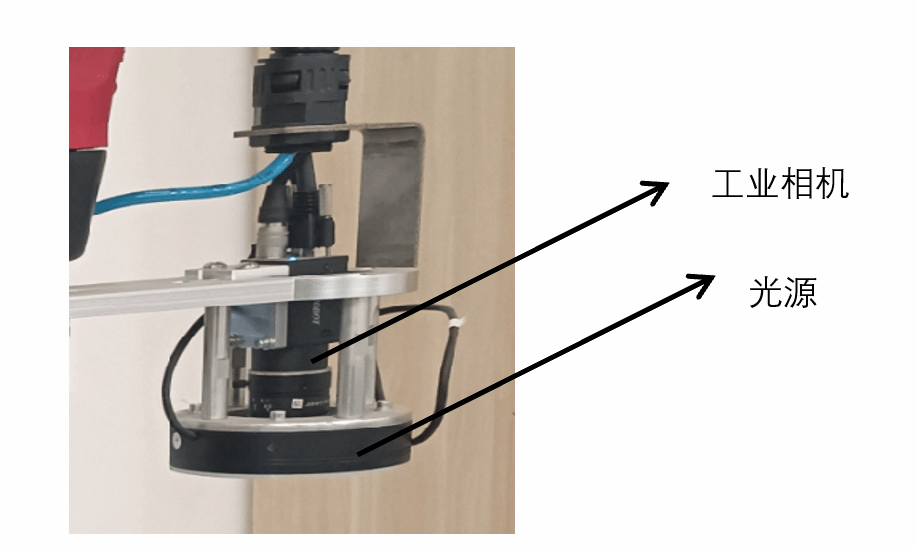
图3:工业相机和光源
运行模式:以海康的视觉软件Vision Master为上位机软件,控制下位机机械臂和PLC控制系统。
2.板块程序的编写:
(1)机械臂编程:示教器为机械臂编程的编译器,分为自动挡、停止挡、手动挡三个模式,以及完成停止挡位的参数设置,以及自动挡的远程控制程序编写,使上位机软件能够远程控制机械臂。
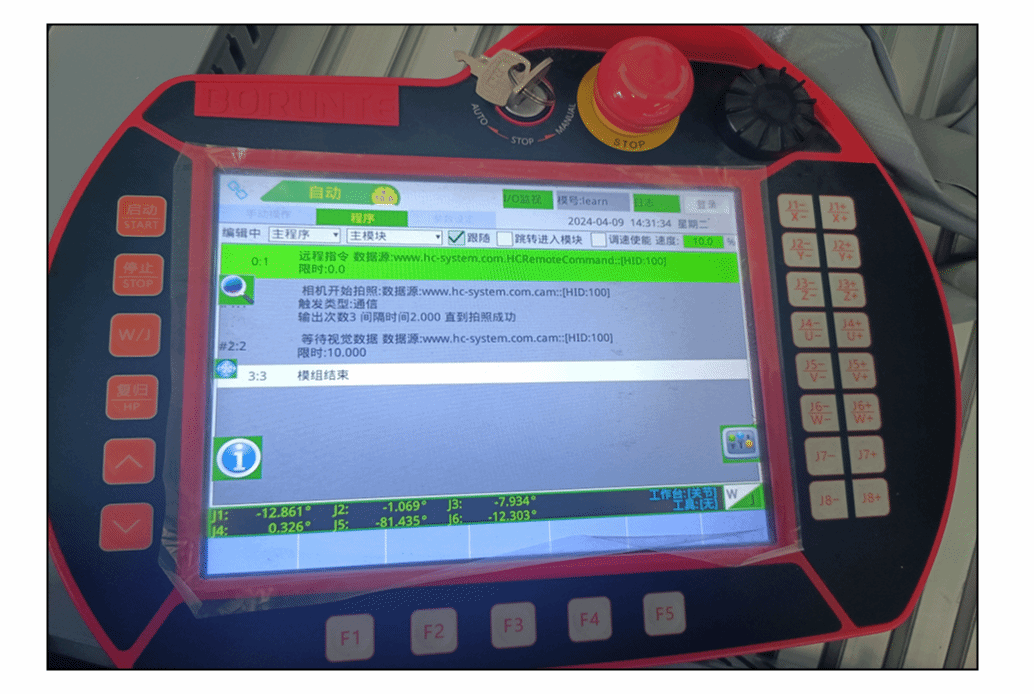
图4:示教器编程界面
(2)西门子编程:西门子型号为s7-1200,所以采用的编程软件为博途软件,根据I/O接线,在博途上面编写了检测物料程序、控制气缸的程序、物料计数程序、以及步进电机控制传送带程序。
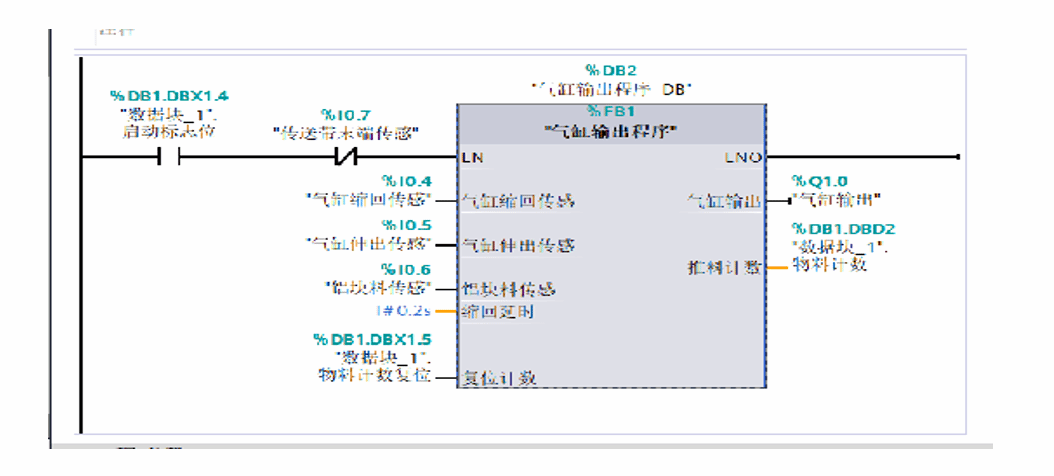
图5:博途软件部分程序示例
(3)Vision Master编程:掌握软件编程的方法,对内置模块的参数和使用有充分了解,搭建了自适应调光的方案;通过编程,能够使用上位机软件简单控制下位机机械臂和西门子1200;用Vision Master软件结合脚本C#编程实现简单的循环调节光照得到目标图像。

图6:Vision Master部分程序
三、下一步工作计划
1.在Vision Master已经编写的方案上,在此基础上完善功能,使自适应调光的调光更细致,效果更好,边缘检测和识别结果准确率更好。
2.在已完成一般光照下的自适应调光,再考虑特殊情况下的自适应调光。此过程需要模拟特殊光照条件,比如强光下,能够完成抗强光干扰等等问题...最终与一般光下的情况合并,实现方案的合并。
3.完成以上工作,加入机械臂的控制和PLC的控制,最终使用Vision Master结合机械臂进行远程通讯,完成整套工作流程。
4.进行模拟光照实验,记录所需记录的实验数据等。
5.整合资料,撰写论文。

问题一:Vision Master视觉软件怎么调节光照?
回答:Vision Master内置光源控制器模块,通过模块化编程加脚本的算法编程,能够有逻辑的改变光源控制器模块的参数,从而调节光照。
问题二:自适应调光采取的是循环模式吗?
回答:该设计采取的方案措施是根据Vision Master的图像质量评估模块反馈的信息来调节光照,如果图像质量不合格,则进行调光,直至图像质量评估合格。

经过这次中期答辩,对毕业论文有了更深刻的认识,经过老师的提醒也发现了之前许多未被注意到的细节,更加明确了之后的研究重点。
通过这次设计,我学习并掌握了许多软件的使用,比如机械臂的基础知识和使用方法,西门子PLC以及触摸屏的编程方法,最主要知道了机器视觉的相关知识,能用视觉软件Vision Master解决机器视觉问题,这对我以后的研究有着巨大的帮助。
最后,我会认认真真完成未完成的工作,完成任务书中的内容,给本科毕设画上完美的句号。

