员工姓名:郑书磊
班生姓级:机械2020-02班
指导教师:俞水
毕设题目:面向多工况的下肢外骨骼逆运动分析研究

一、概况
1.选题意义
随着新时代的来临,下肢外骨骼机器人在越来越多的领域发挥着越来越重要的作用。不论是在医学治疗领域,抑或是抗灾救援、极地科考,甚至军事行动领域都能见到各类下肢外骨骼机器人的身影。对下肢外骨骼机器人技术的研究成为各国各组织创新研究的滩头阵地之一。
下肢外骨骼机器人的显著作用之一就是帮助人类扩展运动能力、克服自然环境的桎梏。为了真正发挥下肢外骨骼机器人的能力,需要确保其在多工况下都能有平稳的运行,对随机路面激励环境中下肢外骨骼的运动做研究。本课题以下肢外骨骼机器人的逆运动学分析为主线,构建起随机路面模型,并将其作用于下肢末端,仿真分析其在随机路面激励下会呈现怎样的运动状态,以此为依据给出相应的总结性意见。能够揭示出复杂环境对下肢外骨骼机器人运动时各类特性的影响,从而为下肢外骨骼机器人新的结构设计或改进提供一定的参考依据,以此帮助优化整体结构、提升安全性和舒适性以及推动更多新技术的投入与使用。
2.任务分解
(1)了解和掌握下肢外骨骼的现状和发展趋势,结构设计与分析的基本方法和手段;
(2)掌握正运动建模方法,构建下肢外骨骼正运动模型;
(3)针对不同工况的路面情况,建立随机路面模型;
(4)构建下肢外骨骼逆运动模型,并求解验证;
(5)撰写毕业设计论文、翻译专业相关的外文资料(6000-10000单词)。
二、已完成工作
1.人体下肢运动规律的研究
CGA数据是对人体正常步态周期内下肢各类物理学数据的捕捉统计,包括但不限于下肢各重要关节角、人体肢体运动惯量、肢体运动功率等。利用连续的曲线近似拟合人体正常步态周期内各个关节转动角,是用来刻画和定量分析人体下肢运动的一种有效途径。本文在拟合函数的基本型选择上选取3个系数不同的基本正弦函数叠加构造一种正弦函数扩展型,来拟合波谷不对称的关节转角数据。由于每个基本型正弦函数的曲线形状彼此不同,利用三者叠加拟合中心不对称的曲线特点,可以较大程度避免直接采用正弦函数拟合引起的残差过大。函数基本型为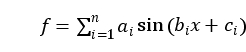 ,具体到单一拟合曲线,n的取值可单独讨论。表征髋关节三个自由度、膝关节一个自由度、踝关节一个自由的CGA曲线拟合如下:
,具体到单一拟合曲线,n的取值可单独讨论。表征髋关节三个自由度、膝关节一个自由度、踝关节一个自由的CGA曲线拟合如下:
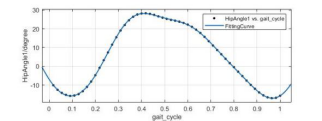
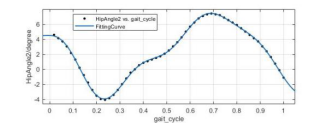
图1 髋关节弯曲/伸展关节角拟合 图2 髋关节内收/外展关节角拟合
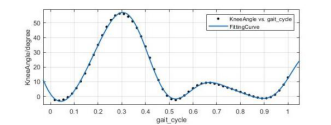
图3 髋关节内/外旋关节角拟合 图4 膝关节关节角拟合
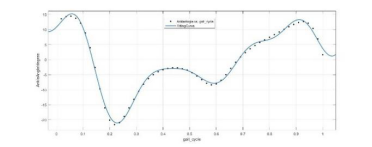
图5 踝关节关节角拟合
通过对以上关节角的CGA数据拟合,可以较为直观德表征出人体下肢的运动规律。
2.下肢外骨骼机器人的模型建立与正运动学分析
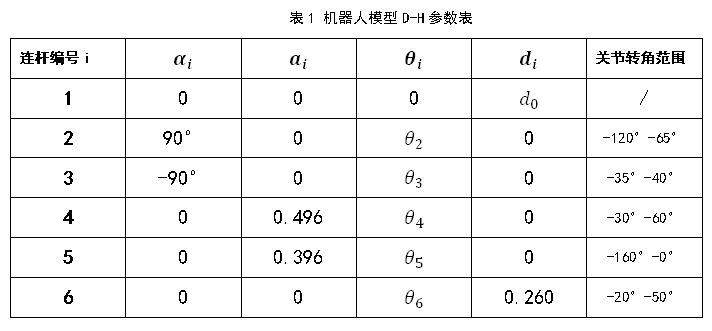
本课题研究设计的下肢外骨骼机器人模型,基于人机耦合性的考虑,对人体下肢进行姿态仿生,选取髋关节三个自由度、膝关节一个自由度、踝关节一个自由度。尺寸上参考《中国成年人人体尺寸》中1.754m成年男性身体数据。运用标准D-H法对下肢外骨骼进行运动学模型的抽象,所设计研究的下肢外骨骼机器人有5个自由度,需要建立6个坐标系来进行描述,为了简化后续计算,在计算程序编制上将第一个关节坐标系与基坐标系重合。
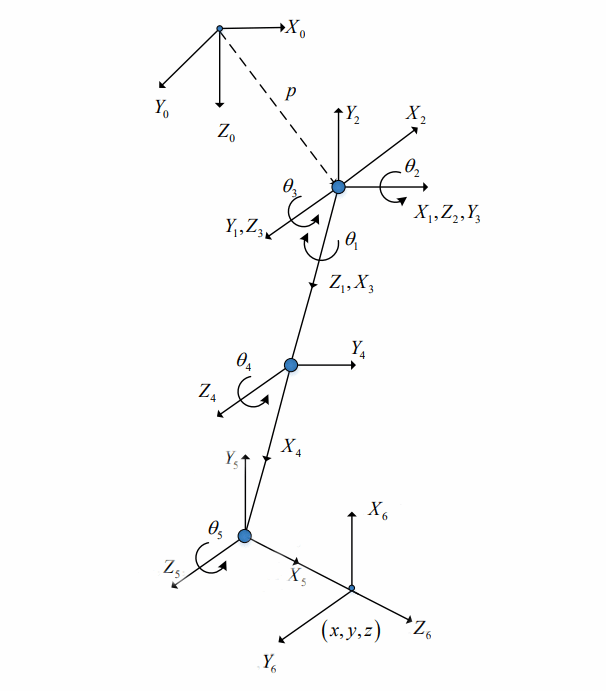
图6 D-H坐标系建模
按照D-H法,利用一个四阶其次变换矩阵,可以描述相邻两个杆件的空间关系,求解机构的末端坐标系相对于固定参考系的等价齐次变换矩阵,是进行正运动学求解的经典方法。连杆之间的变换可最终归结为如下一个矩阵通式:
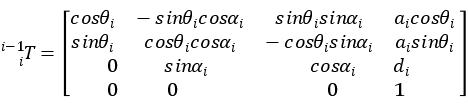
将整个系统的相邻的变换矩阵按照编号进行依次右乘,就可以得到最终的变换矩阵,根据数学分析,该矩阵的前三行的最后一列元素分别对应的是系统末端对于固定坐标系即空间的三维坐标x,y,z。本课题的下肢外骨骼机器人的矩阵具体表达式过于冗长,在此不再赘述,矩阵计算运用MATLAB可以很快进行求解。以CGA曲线中的各关节角作为输入,求解出末端位置的空间变化即为正运动学问题。运用Robotic Toolbox中的相关封装函数以及MATLAB基本函数与循环,可以写出计算程序对末端轨迹进行计算、保留与直观绘制。
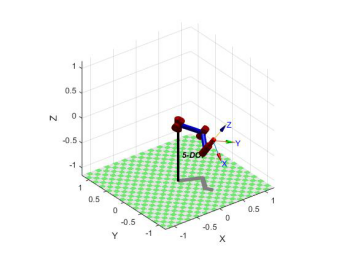
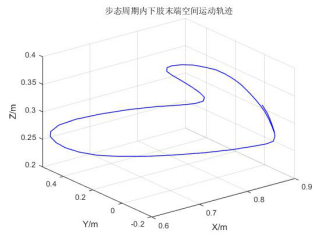
图7 下肢外骨骼机器人的建模示意 图8 步态周期内末端位置的空间轨迹
3.下肢外骨骼机器人的逆运动分析
在现实使用中,逆运动分析才是对机构的设计具有指导意义的分析方法。逆运动学的分析,主要有解析法、图解法等。各种方法的原理在此不再叙述,留与本课题毕业论文中进行简单分析。在本课题的实际操作中,使用Robotic Toolbox中的ikine函数为主体,加入多解的取舍条件构成计算程序的主要部分,对正运动学的解进行逆运动学分析。根据求解结果来看,排除由于算法本身可能在迭代过程中产生的整体微小相移,整体与CGA拟合曲线可以匹配,说明逆运动学求解过程是可靠的,可以用来进行本课题后续更重要的分析。
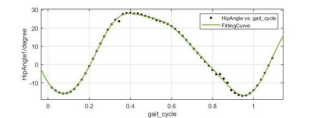
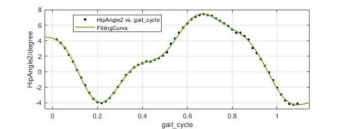
图9 髋关节弯曲/伸展关节角逆解 图10 髋关节内收/外展关节角逆解
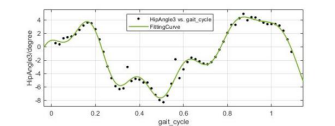
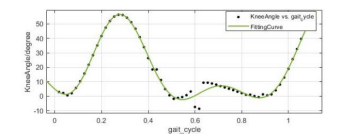
图11 髋关节内/外旋关节角逆解 图12 膝关节关节角逆解
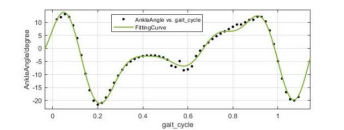
图13 踝关节关节角逆解
4.一阶滤波白噪声模拟随机路面环境及其验证
本课题的主要研究是基于多工况对下肢外骨骼机器人的运动影响,主要研究随机路面的作用。为此首先对随机路面进行模拟,在工具选择上使用Simulink模块。在模型的选择上,本文看中滤波白噪声法凭借其计算速度快、精度较高等优点,决定使用一阶滤波白噪声对随机路面进行模拟。
一阶滤波白噪声模型的具体数学原理及其推导将在毕业论文中详细叙述,此处给出其最终模型:

式中w为系统用于模拟的噪声输入,路面不平度系数为, 为输出的路面激励。在Simulink环境中进行相应的调参与模块布置,可以构建出模拟随机路面的系统,如下图所示:
为输出的路面激励。在Simulink环境中进行相应的调参与模块布置,可以构建出模拟随机路面的系统,如下图所示:
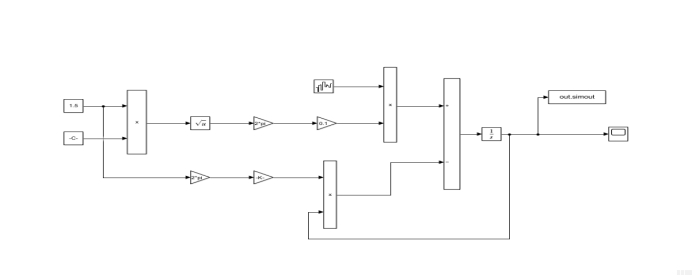
图14 Simulink环境中用于模拟随机路面的系统
为了验证Simulink仿真结果的可靠性,以保证之后的研究是可靠的,利用功率谱密度曲线对路面激励Simulink模型进行验证。功率谱密度的表达式为,理论上只需要对仿真数据进行相应的数学处理即可。为了使得结果可以直观地与标准路面激励功率谱密度上下限进行对比,采用Pwelch方法对时域路面激励进行功率谱密度进行求取。具体算法上选取汉宁窗对信号进行分割,同时采用快速傅里叶变换进行计算,最后进行横纵坐标变换,使得计算结果可以直观地与标准进行比较。对生成的B级随机路面激励和E级随机路面激励进行处理的结果如下所示。可见,由Simulink仿真生成的随机路面激励功率谱密度落在对应级别标准功率谱密度上下线之间,即仿真结果是符合实际情况的。
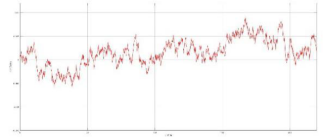
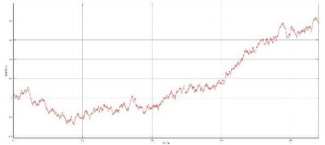
图15 生成的B级随机路面激励 图16 生成的E级随即路面激励
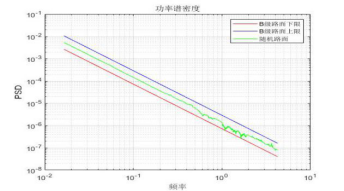
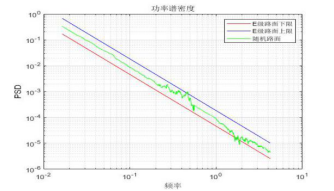
图17 B级随机路面功率谱密度验证 图18 E级随机路面功率谱密度验证
5.随机路面作用下的下肢外骨骼机器人逆运动学分析
将生成的路面加载到下肢外骨骼机器人末端,进行逆运动学求解,可以显著且直观地看到路面对下肢外骨骼机器人运动及各关节的影响。具体的求解方法与未施加路面环境时并无太大分别。对B级路面的分析可见各关节关节角与CGA曲线本身并没有太大差别,即在B级路面作用下,与标准步态相比,每个关节角在每一瞬间的改变量不超过1°,也就是说B级路面对下肢运动影响较小。下为部分计算结果。
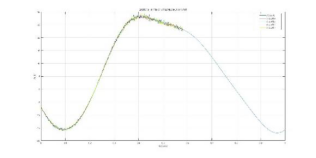
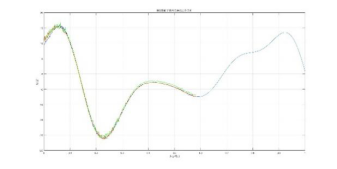
图19 B级路面作用下髋关节弯曲/伸展关节角 图20 B级路面作用下踝关节关节角
而对于E级路面的施加来说,则体现出不同的情况,在E级路面影响下,主要关节角明显偏离CGA曲线,最严重的膝关节甚至在算法中需要提高一定的容忍度才能得出完整的计算曲线,最大的浮动可以在15°到25°之间,也就是说,若设计的下肢外骨骼工作环境恶劣,在E级路面级相似环境中,需要着重考虑对膝关节、踝关节以及髋关节弯曲/伸展自由度的机械结构设计。下为部分计算结果。
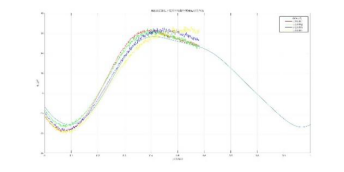
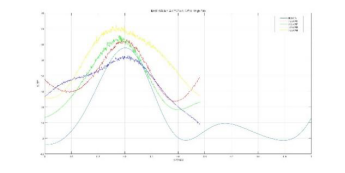
图21 E级路面下髋关节弯曲/伸展关节角 图22 E级路面下膝关节关节角
三、下一步工作计划
继续完善本课题的解决思路、精进算法与计算结果,完成毕业论文的撰写,完成相关外文文献的翻译。继续培养自己发现问题、解决问题的能力和时刻思考的习惯。

问题一:课题中的“多工况”如何理解?
回答: 在我的理解中,多工况是指下肢外骨骼机器人在应用中遇到的各类复杂环境,包括起伏路面、多变天气等。但是我在研究中难以一次性地对大量复杂的环境进行考虑,所以就首先对多种路面环境进行考虑与辨析。也可以说,我所设计的下肢外骨骼机器人是为了克服各类多变的路面环境的。
问题二:你的模型以及计算方案中是否考虑到比如材料刚性的影响,或者是整体物理结构本身稳定性的影响?
回答:在计算过程中确实没有考虑各种物理特性的影响,这是在后续思考中可以深入探究的部分。我的课题在完成的过程中,主要是想研究多工况下模型的运动情况,我想这样的规律放到总体上符合这样抽象模型的复杂结构上,一般规律是可以被相似表征出来的。而包括材料、机械设计,就可以参考这样的规律,去启发式地帮助进行设计上的完善。

白驹过隙。四年的时光就要过去,最后的果实也慢慢成熟。从拿到自己的课题,到收集、阅读文献,查找解决每个步骤问题的方法、不断修改、克服,再到比较结果和辩思,感觉自己从毕业设计中学到的,不仅仅是如何将自己学过的知识进行实际的应用,不仅仅是如何高效地自学新的内容,更是启发着我如何像从前那些伟大的头脑一样去思考、看待问题。
首先感谢俞水老师对我每一步骤的指导、关心,没有他的帮助,我可能还会在很多问题上被阻挡。也要感谢同组同学们每次组会时的积极讨论,帮助我得到新的灵感。
人生如旷野。当我完成属于大学的最后一项任务,将不能回头地奔赴进人生茫茫的荒原,希望我也能如完成毕业设计一般,秉持初心、积极面对、不设轨道,柳暗花明,春华秋实。

